Hallo Olli,
vorweg mal ein paar Tips:
Hier ist Dinos FAQ-sammel-Thread, da sollten sich auch nützliche Tips/Hinweise/Anregungen zu Eagle finden lassen...
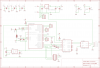
Hier geht er auf die (Minimal-)Beschaltung der Controller ein...
-An die Stromversorgungspin-Pärchen gehört (also) je ein Abblockkondensator (deswegen sind die jeweils nebeneinander - da sollte sich auch ein Hinweis im Controller-Datenblatt und/oder der entsprechenden AppNote finden lassen). 100nF Keramik
-Wenn Du den internen ADC "sauber" verwenden willst, solltest Du die analoge Versorgungsspannung filtern. Über einen Tiefpaß (LC, oder zumindest RC). Also eine 10µH-SMD-Induktivität (oder einen R mit ca 30(?) Ohm) dazwischen. C ist dann der Abblockkondensator.
-Du hast zum programmieren den (alten) 10-Pin-ISP vorgesehen, willst jedoch Platz sparen - wäre hier der 6-Pin-ISP eine Option?
(ich hatte
hier mal mit einer Eagle-Bibliothek angefangen - irgendwie komme ich da grad nicht so recht zu, weiß jetzt auch nicht, welche Version ich hochgeladen hatte, aber vielleicht willst Du sie Dir trotzdem ansehen? Ich würde bei wenig Platz 6Pin-MicroMatch nehmen - die sind in der lib aber definitiv noch nicht drin...)
-als Taktquelle hast Du den internen RC-Oszillator vorgesehen? Oder soll eventuell später noch eine externe Taktquelle dran?
-Atmel empfiehlt bei (zusätzlicher) Verwendung der SPI/ISP-Pins (neben dem Programmieren), hinter der Abzweigung Widerstände einzubauen. Ob das jetzt wirklich notwendig ist, kann ich nicht einschätzen, zumal da ja nur SPI-Slaves dranhängen (die Leitungen also dort beim Programmieren Tristate sein SOLLTEN (und Du sicher kurze Wege hast), ABER ich würde der CS-Leitung (PD7) einen externen Pullup verpassen, da sonst das Signal beim programmieren "in der Luft hängt" - beide Seiten sind Tristate. Du kannst also nicht sicher sein, daß der MCP2515 dann wirklich "Offline" ist, sondern Dir das Programmieren vermurkst...
-die Datenblätter von den beiden anderen ICs hab ich mir (noch) nicht angesehen - vielleicht brauchen die auch Abblockkerkos?
-Zur Wahl der verwendeten Controllerpins kann man nicht viel sagen, wenn man nicht weiß, was da später noch dazukommen soll. So hällst Du Dir zB die beiden TOSC... frei - da kann man also mit'nem entsprechenden Quarz 'nen genauen Sekundentakt (für 'ne Uhr) einbauen.
Du verbindest die beiden Interrupt-Pins, wer soll da wen unterbrechen können? (Int0 ist der Interrupt mit der höchsten Priorität im Controller).
Du belegst mit der CS-Leitung OC2, dafür stehen Dir aber alle ADC-Quellen offen. TWI ist auch frei. Außerdem hast Du die JTAG-Schnittstelle komplett frei. (Diese Pins haben außer JTAG keine weitere Hardware-Funktion - wenn man also auf JTAG verzichtet, sind diese Pins (nur) als konventionelle I/Os verwendbar, und somit erste Wahl zum Schalten irgendwelcher Signale (CS, das auslösen von Interrupts an anderen Chips, Schalten von LEDs/etc (wenn die nicht gedimmt werden sollen (PWM)))
Aber wie schon gesagt, ich kenne Deine weiteren Ziele nicht...(ich halte mir Pins mit interner Hardware möglichst für diese Hardware frei, bzw verwende die eben genau dafür)


") .
.