Um einmal auf denMotor zu kommen ich weiss es jetzt nicht ganz genau aber
Umdrehung Max. 20 - 50 Pro Min. Drehgeber also da 1:1 Übersetzt ist gleiche Drehzahl.
Hallo!
Na, alle Achtung!
20-50 U/min und das 1:1 auf den Drehgeber.

Bei 50 U/min sind das 180.000 Impulse pro Minute.... bzw. 3000 Impulse pro Sekunde.
Na hossa!
Mal eine ganz andere und bescheidene Frage....
Wofür brauchst du eine derart hohe Impulszahl?

Ich könnte mir vorstellen, dass dein Drehgeber nicht zur Erfassung von Drehzahlen gedacht ist sondern eher für Winkeleinstellungen.
Bei Biegemaschinen für die Stahlindustire kann man sie gut verwenden. Allerdings setzt z.B. selbst eine Firma Peddinghaus auf Initiatoren direkt am Getriebe, um die Fehler gering zu halten.
Ich komm da ehrlich noch nicht richtig mit.
Ach so....
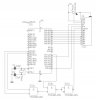
Ging es hier eigentlich nicht um die Ansteuerung einer 7-Seg-Anzeige?
Vielleicht sollten wir den Titel des Thread mal ändern bzw. erweitern.
Gruß,
Cassio
 ?????
?????